 DSLR & Mirrorless
DSLR & Mirrorless  3D Camera
3D Camera  Drone & Action camera
Drone & Action camera 
Industries
Revolutionize your 3D camera precision
with cutting-edge testing tools
3D cameras are widely used nowadays, making possible a three-dimensional image reconstruction of a room or monument, and a 3D estimation of a scene (which is particularly relevant for robotics and automotive applications). Several technologies build 3D models of a scene from images. Photogrammetry does 3D reconstruction by capturing many images from different angles. NeRF (Neural Radiance Field) is based on the same principle, but uses AI to reduce the number of images required.
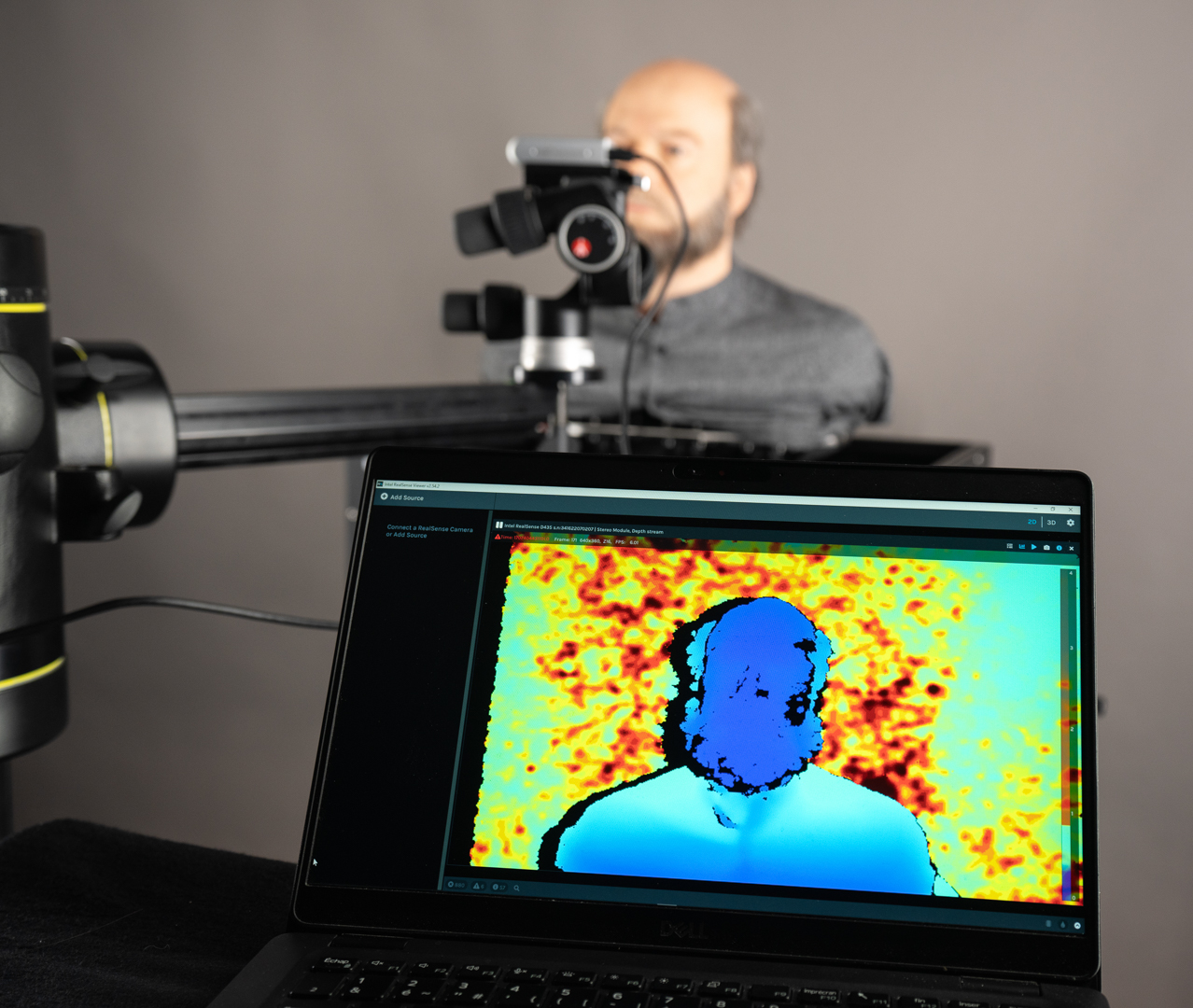
Stereovision estimates 3D from a calibrated set of two cameras. Some “active” systems include a projector to add texture to flat areas. Time-of-flight (TOF) sensors are also commonly used for 3D estimation. The smooth functioning of image-based 3D estimation depends greatly on precise calibration of intrinsic and extrinsic parameters, and on optical defects of the cameras. More generally, very good image quality is important for constructing an accurate 3D model. For example, a high signal-to-noise ratio (SNR) is required for a good image matching. 3D reconstruction devices often require working in various environments, from low light to sunlight, and in scenes with high dynamics.
Engineering services
Our testing services are designed to evaluate every critical aspect of a 3D camera system. From ensuring accuracy in depth perception to evaluating texture fidelity, we provide detailed, actionable insights that can help you push the boundaries of your technology.
Our dedicated professionals use the latest advancements in testing technology to deliver comprehensive reports and recommendations. Whether you are developing new 3D imaging solutions or refining existing ones, our customized testing services ensure that your cameras meet the highest standards of quality and performance.
Associated services

Custom test report and benchmark
Get access to a complete report reflecting your device’s performance according to a specific set of objective metrics that identify its strengths and areas for improvement. Understand where your device stands in the market by comparing its performance with one or several competitors.
Testing Tools
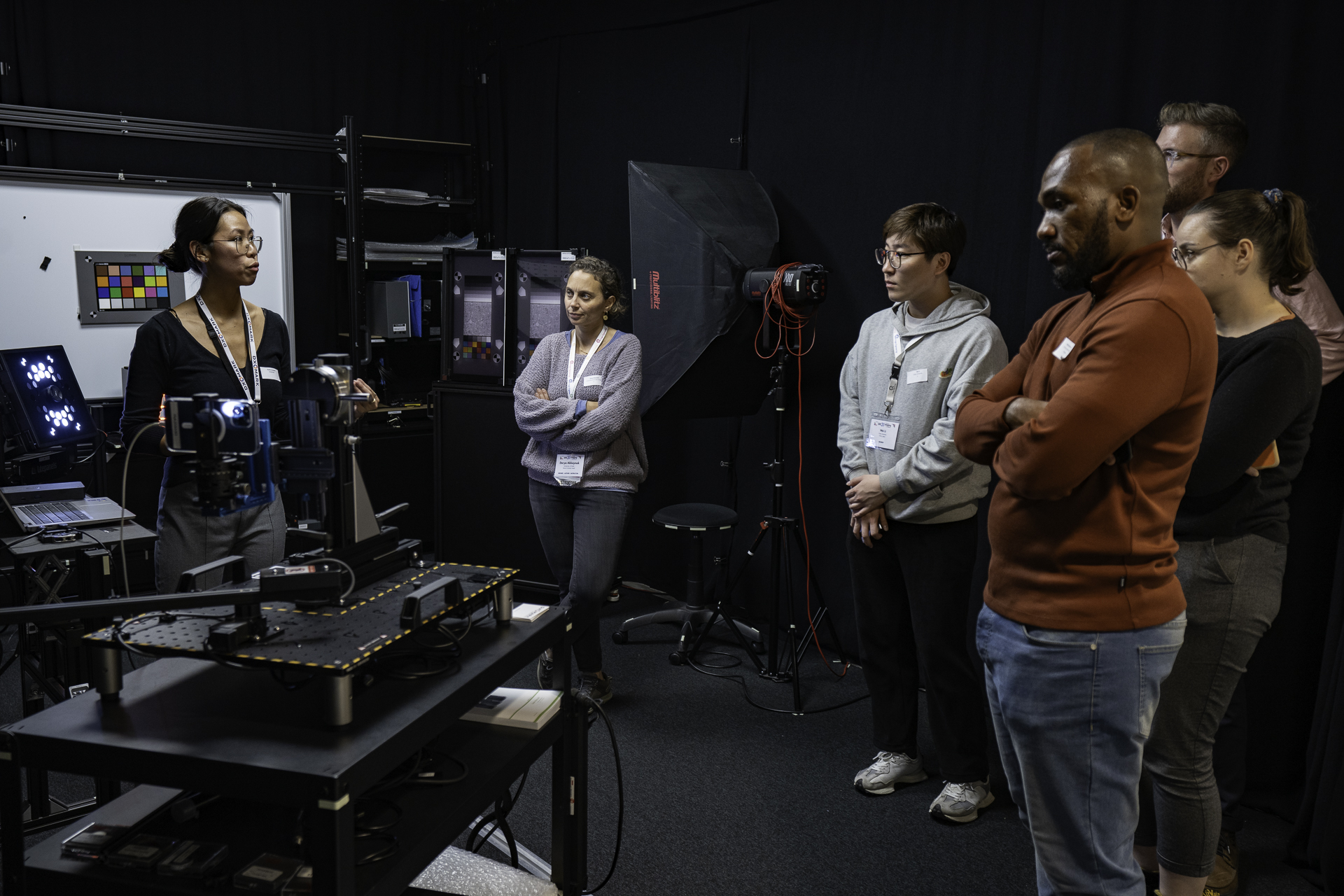
Our testing solution includes a comprehensive hardware and software protocol for testing 3D estimation devices, based on ISO and IEEE standards. DXOMARK Analyzer makes it possible to measure all important image quality factors with great precision, including noise, dynamic range, optical parameters.
The geometry bench allows for precise calibration and performance measurement of stereo cameras. DXOMARK also provides 3D targets as well as realistic mannequins for testing the quality of 3D models and 3D reconstruction. The Multispectral Lighting System (MLS) adjusts the impact of lighting on active and passive systems.




Optimize image quality, enhance depth accuracy, and stay ahead of the competition with DXOMARK’s comprehensive camera testing solutions tailored for the 3D camera industry
3D Geometry calibration
The first challenge with a stereoscopic camera is the calibration of intrinsic and extrinsic parameters. DXOMARK provides easy and fast methods to compute the standard OpenCV and Brand-Conrady models, with error map for accuracy evaluation.

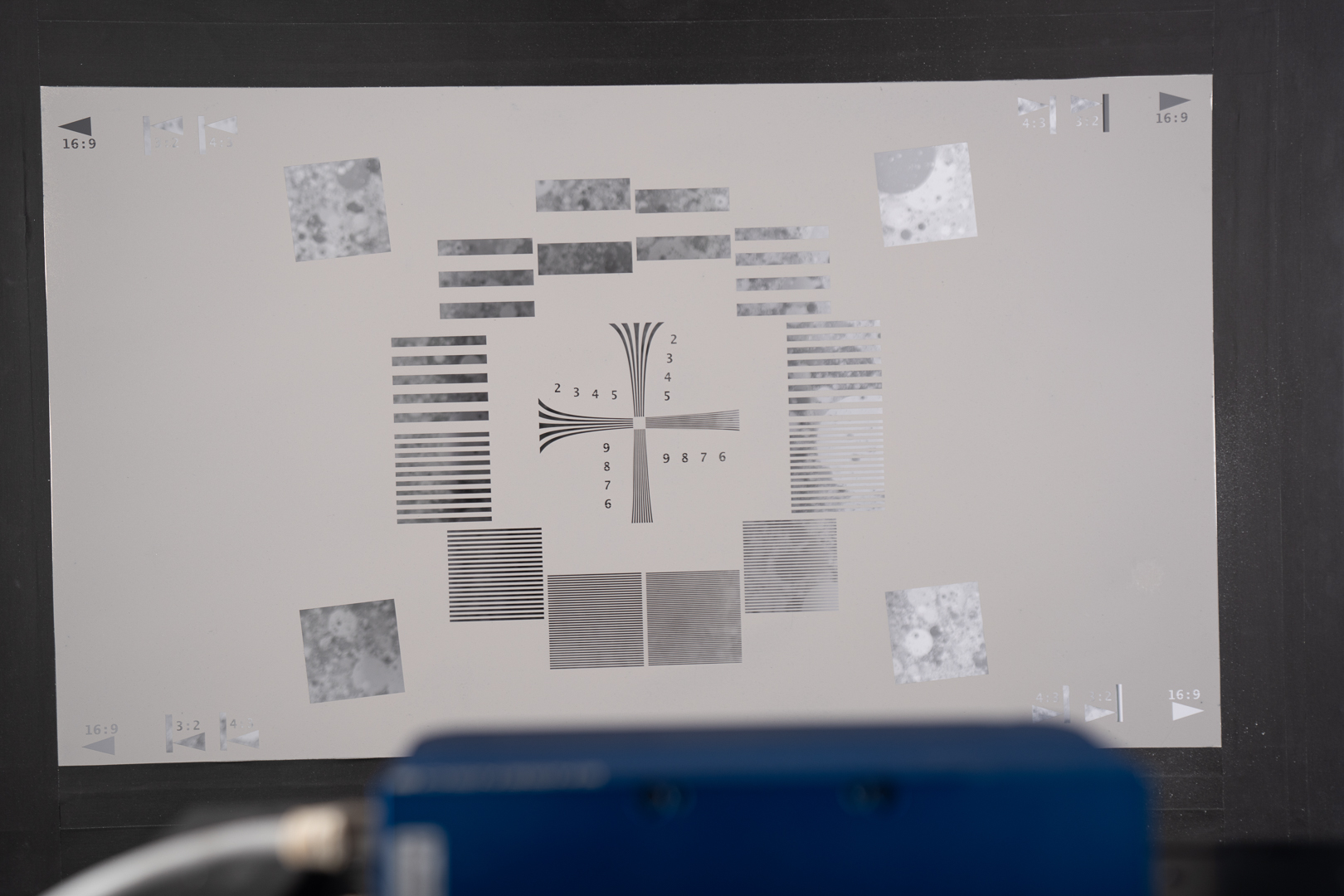
Depth charts
DXOMARK offers a comprehensive range of dedicated charts and metrics designed to evaluate the performance of 3D systems across key features, from spatial resolution to depth resolution. Our specialized testing tools allow for precise measurement and analysis of these critical aspects, ensuring a thorough assessment of your 3D system’s capabilities

Standard IQ testing
Even with tailored tools for 3D systems, DXOMARK can also provide the usual image quality (IQ) testing software and charts. From assessing color accuracy and texture preservation to evaluating distortion models, we ensure a comprehensive analysis of your product’s performance, delivering precise insights to help you achieve the highest image quality standards.