 DSLR & Mirrorless
DSLR & Mirrorless  3D Camera
3D Camera  Drone & Action camera
Drone & Action camera 




Analyzer’s Dual Camera & 3D module helps to calibrate the intrinsic and extrinsic parameters for a variety of setups that use an array of imagers or a pair of cameras to provide a 3D view of the world or a depth map for advanced gesture-based user interfaces.
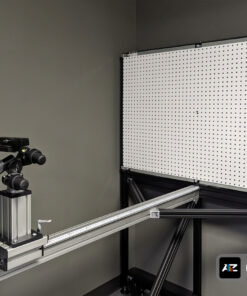
Our 3D Bench integrated solution includes essential hardware and software for analyzing stereoscopic devices and camera arrays. Thanks to the very accurate glass chart associated with a mechanical setup to control the movement of the camera, you can perform all these measurements with just two shots to the target with high precision results, allowing you to perform a calibration of the intrinsic and extrinsic parameters quickly and easily.
Measurement descriptions
Intrinsic calibration
Intrinsic calibration measures the geometrical distortion of the lens, but it also delivers the accuracy of the distortion profile. Several distortion models can be computed: OpenCV 5 parameters, Open CV 12 parameters and internal polynomial 14 degree XY.
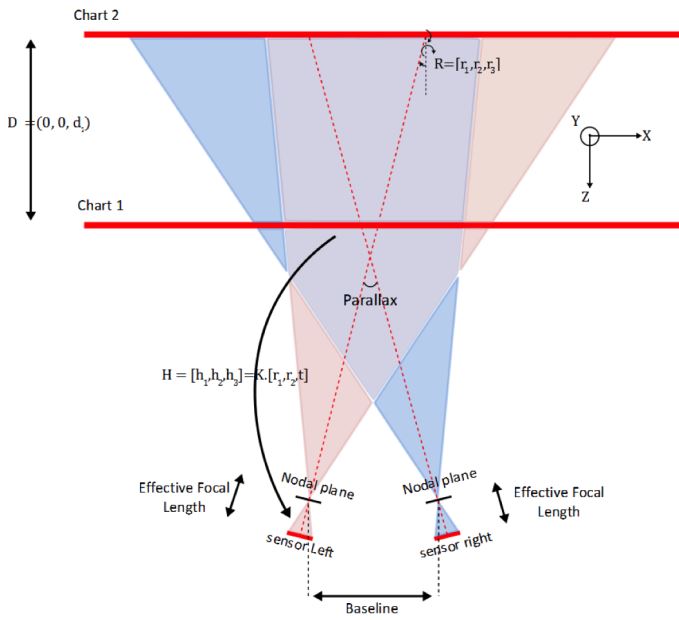
Extrinsic calibration
The relative position and orientation of the 2 cameras are computed with very high accuracy with a minimal number of shoots. The result is a set of parameters compatible with OpenCV stereovision model.
Examples of results
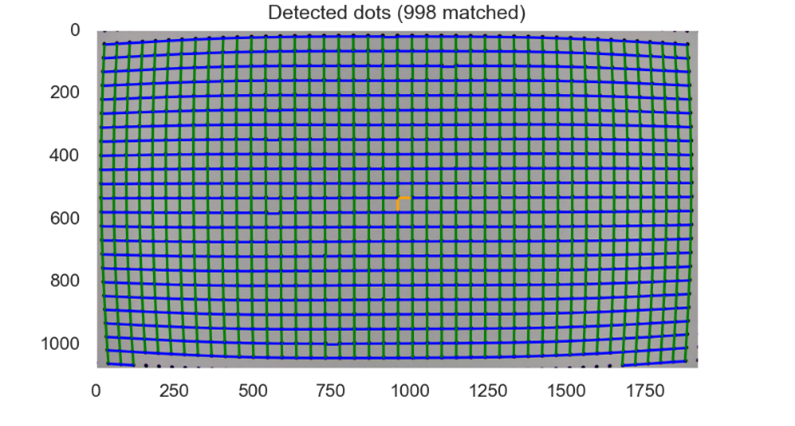
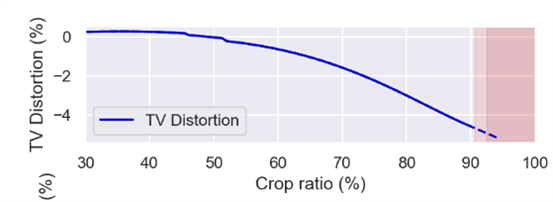
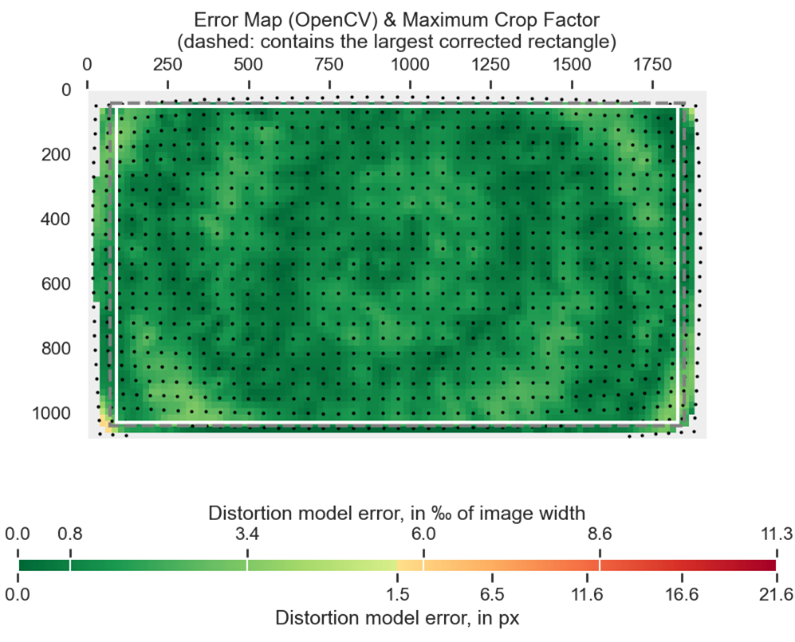
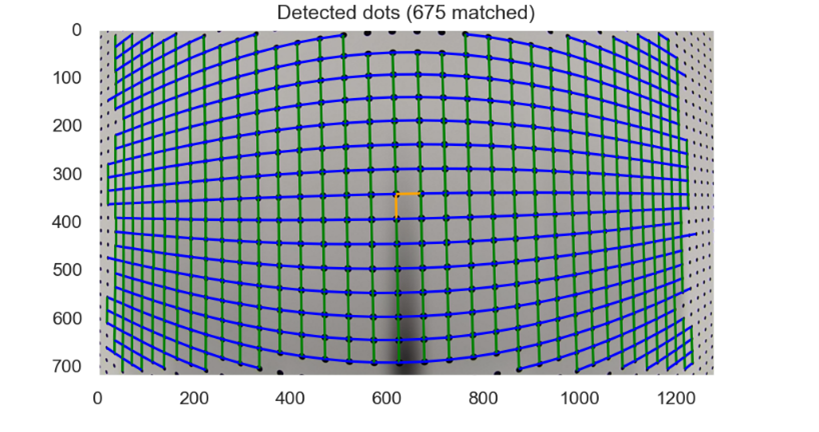
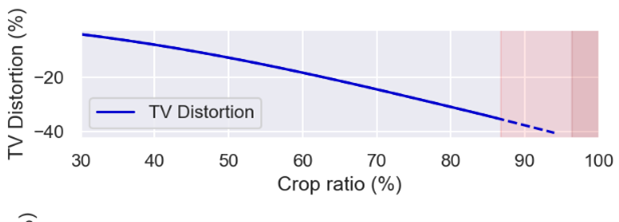
In the images above, the capture frame with the detected dots (left), the TV distortion computed from the lens model estimated (center) and the local error of the model in the image field ( right).In this example, the model used if the OpenCV classical model with 5 parameters. this model fits perfectly the lens and gives an error lower than 1 pixels in the full field.
The images above show the capture frame with the detected dots (left), the TV distortion computed from the lens model (center), and the local error of the model in the image field (right).In this example, the OpenCV classical model with 5 parameters is used. This model perfectly fits the lens and gives an error lower than 1 pixel in the full field.
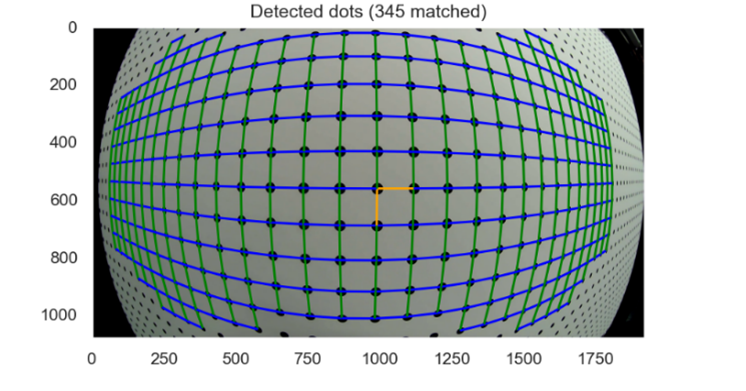
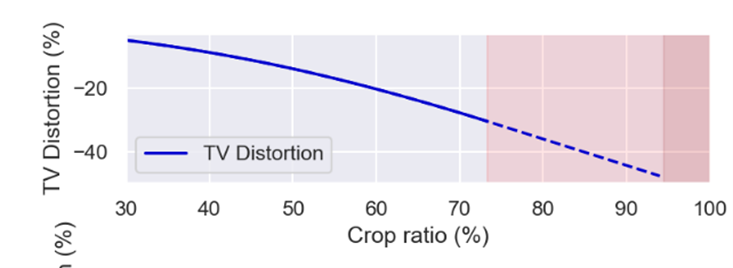
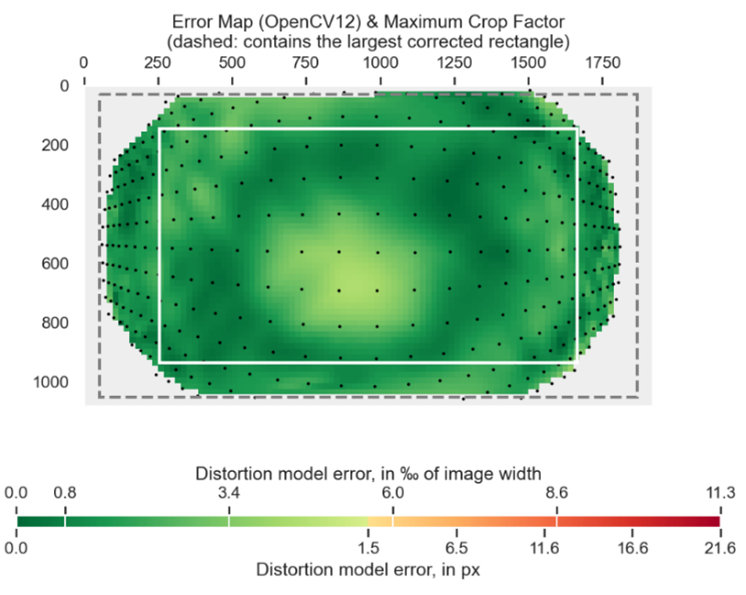
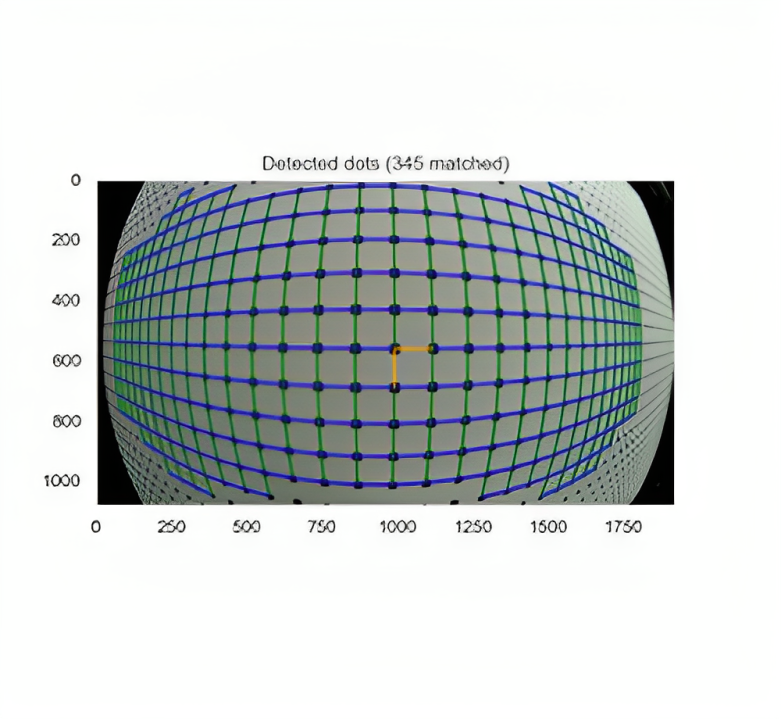
This lens has an FOV of more than 180°. Measuring the lens distortion of such a lens is always a challenge. But thanks to our 2m large target and an in-house dot-detection algorithm, we are able to do it. The OpenCV 5 parameters model is not flexible enough for this lens. The best accuracy is reached using the OpenCV 12 parameters.
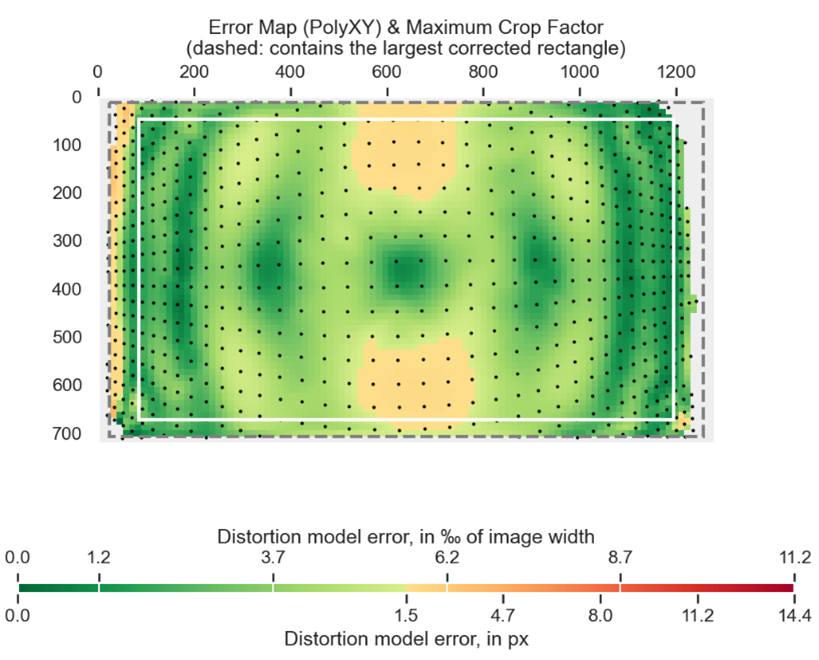
This very unusual lens is used to avoid volume anamorphosis (for example, a distorted face near the image border when using a wide-angle camera). It is a non radial lens. In this case, the classical OpenCV model does not work at all. Instead, the DXOMARK XY polynomial model gives satisfactory results.